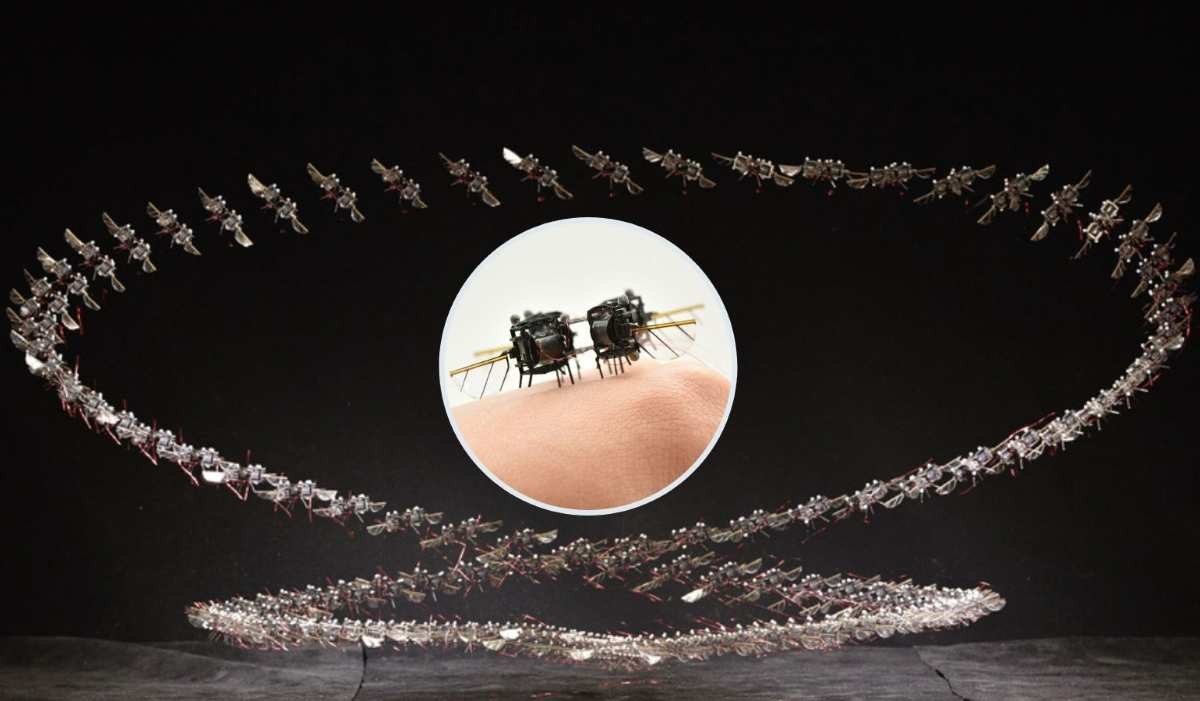
Wissenschaftler des MIT haben einen fliegenden Mikroroboter entworfen, der schnell wie ein Hummel fliegt. Diese Mini-Roboter zeichnen sich durch ihre flinken Bewegungen aus und sind in der Lage, akrobatische Manöver, extreme Drehungen und eine hohe Beschleunigung auszuführen.
Durch den Einsatz künstlicher Intelligenz wird der komplexe Flug in Echtzeit gesteuert. Die potenziellen Anwendungen dieses fliegenden Roboters reichen von Rettungseinsätzen in engen Räumen bis hin zu sicheren Inspektionen. Der Umweltfaktor ist ebenfalls bedeutend: weniger schwere Maschinen und geringere Risiken werden angestrebt.
Ein fliegender Mikroroboter mit bemerkenswerter Agilität
In der Zukunft könnten diese kleinen fliegenden Roboter dabei helfen, Menschen zu finden, die nach einem Erdbeben in Trümmern eingeschlossen sind. Ihre geringe Größe und Beweglichkeit ermöglichen es ihnen, Lücken zu erreichen, in die herkömmliche Drohnen nicht eindringen können, während sie instabile Fragmente oder Staub umgehen.
Bisher konnten fliegende Mikroroboter nur langsame und sanfte Flüge durchführen, weit entfernt von der Agilität eines realen Insekts. Doch ein neues Team hat jetzt das Gegenteil bewiesen.
Ein gemeinsames Team hat einen auf künstlicher Intelligenz basierenden Controller entwickelt, der es diesem Roboter ermöglicht, akrobatische Trajektorien auszuführen, einschließlich kontinuierlicher Saltos. Mit einer zweiphasigen Steuerarchitektur gelang es, die Geschwindigkeit um 450 % und die Beschleunigung um 250 % im Vergleich zu den besten vorherigen Prototypen zu steigern.
Das bemerkenswerte Ergebnis: 10 Saltos in 11 Sekunden, ohne mehr als 4 bis 5 Zentimeter von der geplanten Route abzuwichen, selbst bei Windböen.
Ziele und Herausforderungen
Kevin Chen, außerordentlicher Professor am MIT und Mitautor der Studie, betont das langfristige Ziel: Roboter zu schaffen, die in Umgebungen fliegen können, in denen herkömmliche Drohnen erhebliche Schwierigkeiten hätten, aber ein Insekt sich problemlos bewegen würde.
Der künstliche Intelligenz-gestützte Controller
Chens Team arbeitet seit Jahren an der Weiterentwicklung dieser Roboter. Die neueste Version, die etwas größer als eine Microcassette ist und weniger wiegt als eine Büroklammer, hat größere Flügel und weichere künstliche Muskeln, die in der Lage sind, mit extrem hohen Frequenzen zu schlagen.
Allerdings gab es eine Einschränkung bei der Steuerung: Der Controller musste manuell eingestellt werden, was das Potenzial der mechanischen Systeme des Roboters einschränkte.
Um aggressiv und präzise wie ein Insekt zu fliegen, war ein System erforderlich, das in der Lage ist, Unsicherheiten zu bewältigen, komplexe Manöver zu optimieren und binnen Mikrosekunden zu reagieren. Das Problem war, dass jeder Controller, der ausreichend leistungsfähig war, zu kostspielig in der Berechnung war, um in Echtzeit zu funktionieren.
Die Zusammenarbeit mit dem Team von Jonathan How führte zu einem entscheidenden Fortschritt: einer Architektur, die sowohl robust als auch schnell ist.
Zuerst wurde ein modellbasierter prädiktiver Controller entwickelt, der das Verhalten des Roboters vorhersagen und den optimalen Plan für jedes extrem durchgeführte Manöver berechnen kann. Dieser Planer kann anspruchsvolle Situationen wie Drehungen, abruptes Bremsen oder Folgen von Saltos simulieren, während er physikalische und sicherheitstechnische Grenzen berücksichtigt.
Darauf aufbauend wurde durch Nachahmungslernen eine auf tiefem Lernen basierende Politik trainiert, die diese hohe Intelligenz in ein leichtes Modell komprimiert, das in Echtzeit ausgeführt werden kann. Der Schlüssel lag darin, die richtige Menge an Trainingsdaten zu generieren, um das System nicht zu überlasten und gleichzeitig alle kritischen Szenarien abzudecken.
Leistung vergleichbar mit einem Insekt
In Tests flog der Roboter 447 % schneller, beschleunigte um 255 % und behielt eine außergewöhnliche Präzision bei. Er führte „sakkadische“ Bewegungen aus, plötzliche Kopfbewegungen, die Insekten verwenden, um sich zu orientieren und die Sicht zu stabilisieren. Diese Biomimetik eröffnet die Möglichkeit, in Zukunft Kameras und Sensoren für autonome Flüge im Freien zu integrieren.
Die nächste Herausforderung wird sein, diese Mikroroboter unabhängig von externen Bewegungserfassungssystemen fliegen zu lassen. Zudem möchte das Team erforschen, wie Kollisionen zwischen den Robotern vermieden und Gruppenflüge koordiniert werden können.
Externe Experten, wie Sarah Bergbreiter von der Carnegie Mellon University, heben die Fähigkeit des Roboters hervor, präzise Manöver trotz Turbulenzen von über 1 Meter pro Sekunde und den typischen Herstellertoleranzen bei so kleinen Maßstäben aufrechtzuerhalten.
Obwohl der Controller noch nicht an Bord des Roboters läuft — er benötigt einen externen Computer — zeigen die Tests, dass vereinfachte Versionen möglicherweise auch im Roboter selbst funktionieren könnten. Dies ist ein bedeutender Fortschritt zur Skalierung dieser Technologie für reale Missionen.
Potenzial der Technologie
Diese Technologie hat das Potenzial, zu einem entscheidenden Werkzeug in Aufgaben zu werden, die heute ressourcenintensiv sind. Mögliche Anwendungen umfassen:
- Inspektion von Solar- oder Windanlagen ohne Hubschrauber oder schwere Fahrzeuge;
- Überwachung von Wäldern auf Brandherde, bevor sie sich ausbreiten;
- Schadensbewertung nach Stürmen oder Überschwemmungen, ohne menschliche Ressourcen zu gefährden;
- Kartierung der Biodiversität in geschützten Gebieten, ohne das dortige Wildleben zu stören.
Der Fortschritt stellt nicht nur einen Meilenstein in der Robotik dar. Vielmehr ist er ein Weg, um Auswirkungen zu reduzieren, in Notfällen schneller zu handeln und den Umfang der Umwelterhaltung zu erweitern, ohne unsere technologische Fußspur zu vergrößern. Ein kleiner Roboter mit großen Ambitionen und ein Beispiel dafür, wie Innovation tatsächlich mit einer nachhaltigeren Zukunft in Einklang gebracht werden kann.